Why Sponsor Us?
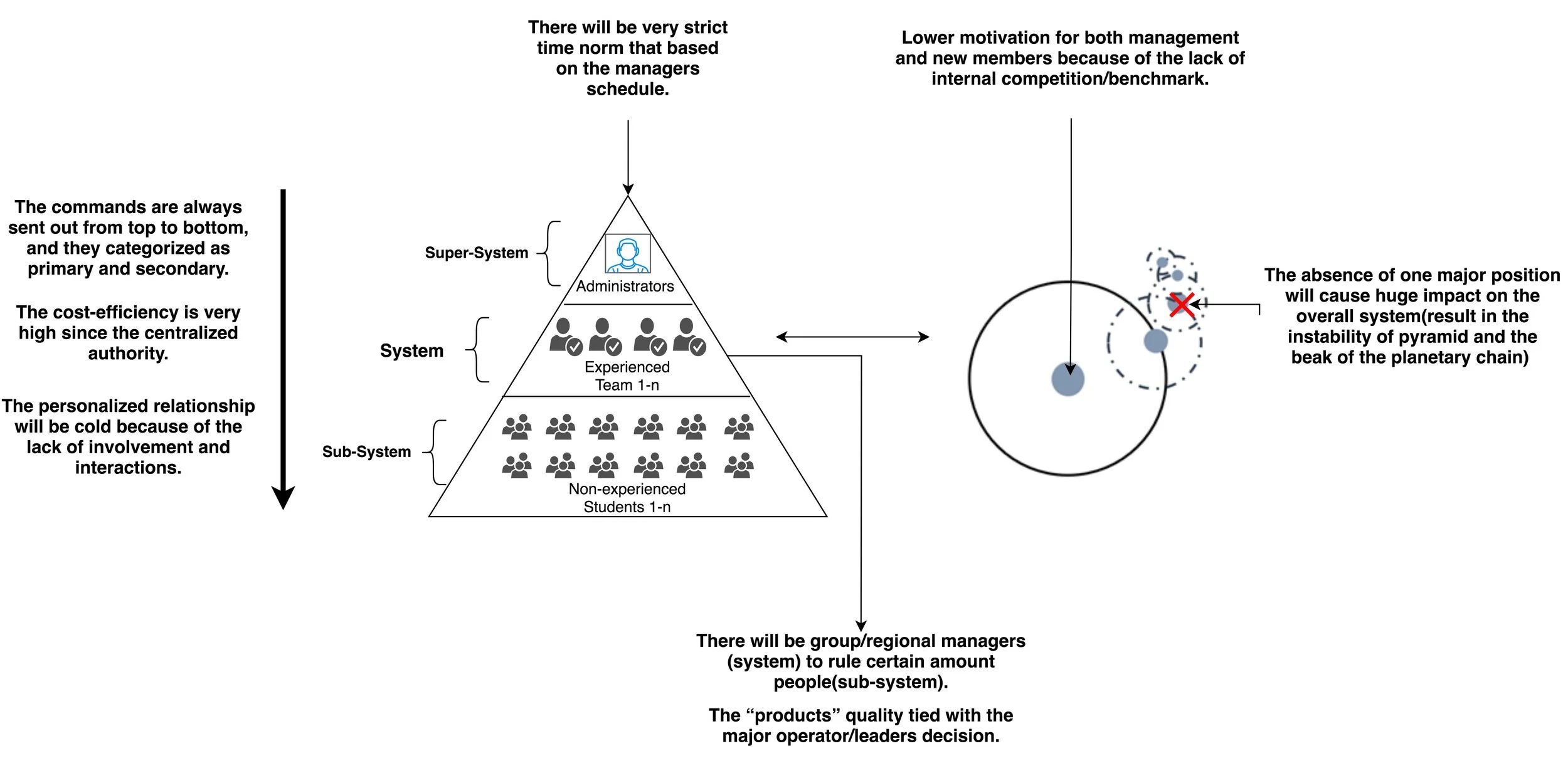
The biggest problem in a typical club model is the loss of human resources and shared knowledge. The loss of human capital is caused by the lack of involvement and commitment from members. A classic tech club will try to recruit the members with the desired skill sets, and students with less qualification are either waiting for lower level tasks or seat there watch other “higher-level” members work. This will result in a high liquidity of human resource flow that around 50% of new coming students will stay in the club for 1-2 weeks and disappear. To defeat this problem, the new club structure should be less “giving out orders” and “a particular person doing one particular job”.
Purdue Robomaster Open Course-Teaching session
The teaching session prepared for non-experience students will ensure the involvements while maintaining a non-pushy environment. The teaching session is not complimentary, the students will stay only because they want to learn the knowledge and be better at robotics, and this will be the strongest fuel/motivation of the club. Once the teaching system is sophisticated enough with the growth of the club, there will be less skill level hierarchy and knowledge gaps. The student groups will be self-grow and self-governing in a parallel way with the club.
The new structure should also be adaptive when core position transition occurs. Since the club structure is highly decentralized, the growth of the club is driven by the quality of study topics (divided into small research groups) and student’s passion for knowledge. Therefore, the impact of position change will be less, the teaching materials (club manual books, study topic publications etc.) will reduce the relevant knowledge loss as well.

Fig.The new model (Buurtzorg model)
Therefore, after one semester teaching sessions, students from the learning group will start to immerse into a certain research topic they want to explore, and eventually become a new research groups. This will slowly enrich this diversity and human resource in this ecosystem.
Model credit to: The Logical Structure of ARIZ-85C and its Application in Science - Justus Schollmeyer — Berlin, Germany, https://www.aitriz.org/tz2018abstracts/78-the-logical-structure-of-ariz-85c-and-its-application-in-science/file






